Resources
 Part of the Oxford Instruments Group
Part of the Oxford Instruments Group
Expand
Collapse
Part of the Oxford Instruments Group
Solution Note
Author: Tom Secull
Published: 01 Sep 2025 · Last updated: 16 Sep 2025
Surveillance systems are critical to the operation of modern security services, providing situational awareness that supports strategic planning and tactical decision making alongside accurate detection and identification of threats. Imaging systems may be deployed to establish situational awareness in a wide range of operations:
The cameras used for these tasks are expected to operate reliably, remotely, autonomously, day and night, from both mobile and static platforms. They also need to be able to deliver images that provide accurate situational awareness in various global environments each with different, changeable, and often challenging visual conditions.
From a technical standpoint, surveillance images must provide sufficient contrast between a target and its background environment to ensure detection (see Figure 1) . To achieve this, a camera with very low noise is required, as with lower noise it’s possible to reliably identify smaller pixel-to-pixel illumination differences and reveal low-contrast targets that appear to blend into their surroundings (e.g. Leslie et al. 2024 ). The biggest contributors to noise in surveillance images are the camera’s read noise and dark current noise.
A surveillance camera with high sensitivity, or high quantum efficiency, is required to ensure its efficacy in low-light conditions. Such conditions might occur at night or under inclement weather. Broadband camera sensitivity (over a large wavelength range) is also beneficial in surveillance applications. Two objects with different composition may have very different intrinsic brightness or reflectivity at different wavelengths (Wiley et al. 2022). As a result, detectable contrast between these two objects also varies with wavelength. A camera with broadband sensitivity is required to take advantage of the difference in composition between a target and its surroundings and provides the capability to detect it with high contrast in more than one passband.

Figure 1 - Night vision at infrared wavelengths. Imaging of a boat in a swimming pool on a moonless night. Note how contrast between objects in the image defines much of our ability to distinguish them. The brighter body of the boat has low contrast and stands out much less clearly from the poolside than the boat’s darker funnel. Camera used: C-RED 2 with sensor cooled to -15 C and operated in high-gain mode. The camera was optically coupled to a 16 mm SWIR lens.
Many real-world environments have a high degree of illumination contrast (see Figure 2), which means they can only be accurately imaged with a camera capable of recording a high dynamic range. If a camera’s dynamic range is too small, information about the brightest or faintest regions of a scene may be lost. A camera’s ability to distinguish regions with small differences in contrast may also suffer if its dynamic range is too low.

Figure 2 - An uncooled C-RED 3 camera with a 70-200 mm tele-objective is used for a surveillance application. A camera with high dynamic range is needed to simultaneously capture details in both brightly and dimly illuminated parts of this scene.
Maximising spatial resolution is also key to both detection and identification of surveillance targets (e.g. Leslie et al. 2024). Images with higher resolution provide better spatial separation of a target from its surroundings and allow more accurate identification by recording a more detailed impression of its size and shape. Reducing blending between a target and the background in each pixel also boosts the contrast between them.
Surveillance cameras are often used to track moving objects, or they may be deployed on mobile platforms such as ships or aircraft. Electronic global shuttering operation is essential in these contexts to eliminate motion blur in images and mitigate the rolling shutter effect when imaging at high frame rates.
At visible wavelengths (Figure 3), high performance sCMOS cameras provide excellent broadband sensitivity, resolution, linearity, dynamic range, speed, and temperature stability as well as wide fields of view. A variety of cooling options can support improved dark current suppression that reduces noise in images acquired with longer exposures (up to several minutes if needed). The read noise of modern sCMOS cameras is exceptionally low, ensuring that very low contrast targets can be detected and identified. State of the art wide field sCMOS sensors simultaneously offer unprecedented field of view and spatial resolution, supporting accurate spatial discrimination of large or rapidly moving targets. Precision imaging of moving targets is also aided by elimination of a mechanical shutter in favour of an electronic global shutter. Electronic shuttering also removes a mechanical point of failure from the camera's design.

Figure 3 - The electromagnetic spectrum showing the Ultraviolet (UV), Visible, Short Wave Infrared (SWIR), and Mid/Long Wave Infrared MWIR/LWIR wavelength regions.
Because Short Wave Infrared (SWIR; Figure 3) photons can penetrate further through Earth’s atmosphere than visible photons before being absorbed or scattered, SWIR cameras are often favoured in surveillance applications that need images to be acquired at long range (see Figure 4). SWIR light can also penetrate atmospheric conditions formed by fine particles, including fog, haze, dust, and smoke, making SWIR imaging readily adaptable to surveillance tasks conducted under a wide range of real-world conditions that would reduce the effectiveness of a visible imaging system (Wiley et al. 2022). As with silicon-based sCMOS cameras in the visible, high performance SWIR cameras based on InGaAs detector technology can deliver high broadband SWIR sensitivity, dynamic range, and speed for long range surveillance imaging in low light conditions.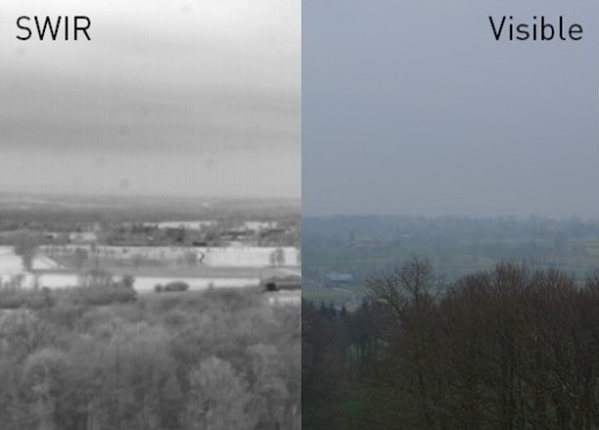
Figure 4 - Demonstration of the increased range achieved by imaging at SWIR wavelengths instead of visible wavelengths. In this image SWIR light also cuts through the fog to image the countryside at much greater distances. An uncooled C-RED 3 camera combined with a 16 mm SWIR lens was used to capture the SWIR image.
The sensitivity of both Si and InGaAs based sensors is high enough to allow detection and identification of targets on both moonlit nights and moonless ones where infrared skyglow is the only source of illumination (see Figure 5). These technologies are effectively equivalent in sensitivity to thermal imagers in all nighttime conditions unless the target is not obscured in heavy shadow or cloud cover. While thermal imagers reliably detect warm objects (like vehicles) they cannot match the spatial resolution and identification capabilities offered by SWIR and visible imaging cameras. SWIR and visible cameras can therefore enhance any already existing thermal imaging capabilities for surveillance (Vollmerhausen et al. 2013).
Figure 5 - Demonstration of SWIR nighttime imaging for maritime surveillance and security undertaken with C-RED 2. First Light Imaging contributed this demonstration to the 2020 i-Naval event organised by the French Armaments Agency (DGAA), the University of Toulon, the French Navy, and TVT Innovation.
Andor recommends CB2 24B for high performance flexible wide field surveillance imaging at visible wavelengths:
| Attribute | Result | Unit |
| Read Noise | 1.3 | e- |
| Dark Current with sensor @ 0 C | 0.0044 | e-/pix/s |
| Peak QE | 74 | % |
| Selectable Dynamic Range [HDR] | 8, 10, 12 [16] | Bit |
| Sensor Format | 5328 x 4608 | - |
| Pixel Pitch [2x2 Binned] | 2.74 [5.48] | µm |
| Shuttering | Global | - |
| Peak Frame Rate (CoaXpress) | 37 | Hz |
| Peak Frame Rate (GigE) | 24 | Hz |
| Dimensions | 163.5 x 93 x 72.6 | mm |
| Maximum Power Consumption | 60 | W |
| Minimum Ambient Operating Temperature | -40 | C |
| Maximum Ambient Operating Temperature | +50 | C |
Table 1 - Main performance attributes of the CB2 24B for surveillance. Peak frame rates are defined for full frame readout in 16-bit High Dynamic Range (HDR) mode; much higher frame rates can be reached if the dynamic range is reduced or if only a subregion of the full array is read out.
Andor recommends C-RED 2, C-RED 2 Lite, and C-RED 3 for SWIR surveillance imaging. Each of these is a high-speed SWIR VGA camera built around the 640 x 512 InGaAs Snake SW sensor from Lynred. The on-head sensor cooling offered by each camera model is what differentiates them.
C-RED 2’s sensor is thermoelectrically cooled, with heat being transferred to an internal heatsink in the camera head. Forced air or liquid coolant (usually water) then transfers heat out of the camera. Air cooling allows a minimum sensor temperature set point of -15 C. Liquid cooling allows for deeper cooling down to -40 C, providing the strongest dark current suppression for long exposure imaging.
C-RED 2 Lite’s sensor is thermoelectrically cooled and thermally coupled to the camera’s outer casing. The casing, which doubles as the camera’s heat sink, ambiently dissipates heat into the surrounding environment. The minimum sensor set temperature is limited to 25C below that of the outer casing. For this reason, C-RED 2 Lite is referred to as a temperature stabilised camera.
C-RED 3’s sensor is uncooled; its heat is ambiently dissipated into the environment through the camera body. C-RED 3 relies entirely on operating with short exposure times to mitigate dark current noise buildup.
Deeper cooling suppresses dark current buildup during longer exposures, reducing dark current noise in images. While reduced cooling capacity may seem like a limitation for C-RED 2 Lite and C-RED 3, removal of part or all of the cooling system from these cameras reduces their size, weight, and power draw (SWaP). C-RED 2 Lite and C-RED 3 are often better suited to integration into other platforms or devices than C-RED 2, especially if they are mobile or resource/space constrained.
Let’s dig into more details about C-RED 2, C-RED 2 Lite, and C-RED 3:
Each of these cameras is rated for operation across a wide temperature range (see Table 2), ensuring accurate imaging can be performed in hostile conditions and/or remote locations.
| Attribute | CR2 | CR2L | CR3 | Result | Unit |
| Typical [Max] Short Exposure Noise | X | 23 [28] | e- | ||
| Typical [Max] Short Exposure Noise | X | 28 [35] | e- | ||
| Typical [Max] Short Exposure Noise | X | 37 [45] | e- | ||
| Typical [Max] Dark Current: Sensor @ -40 C | X | 0.365 [0.600] | ke-/pix/s | ||
| Typical Dark Current: Sensor @ +5 C | X | 24 | ke-/pix/s | ||
| Typical Dark Current: Sensor @ +40 C | X | 755 | ke-/pix/s | ||
| Peak QE | X | 80 | % | ||
| Peak QE | X | 76 | % | ||
| Peak QE | X | 74 | % | ||
| Selectable Dynamic Range [HDR] | X | X | X | 14 [16] | Bit |
| Sensor Format | X | X | X | 640 x 512 | - |
| Pixel Pitch [2x2 Binned] | X | X | X | 15 | µm |
| Peak Frame Rate | X | X | X | 602 | Hz |
| Dimensions | X | 136.5 x 74.9 x 55 | mm | ||
| Dimensions | X | 78.1 x 65 x 65 | mm | ||
| Dimensions | X | 59.5 x 56 x 56 | mm | ||
| Maximum Power Consumption | X | 90 | W | ||
| Maximum Power Consumption | X | 25 | W | ||
| Maximum Power Consumption | X | 18 | W | ||
| Minimum Ambient Operating Temperature | X | -5 | C | ||
| Minimum Ambient Operating Temperature | X | -40 | C | ||
| Minimum Ambient Operating Temperature | X | -40 | C | ||
| Maximum Ambient Operating Temperature | X | +35 | C | ||
| Maximum Ambient Operating Temperature | X | +48 | C | ||
| Maximum Ambient Operating Temperature | X | +35 | C |
Table 2 - Main performance attributes of C-RED 2, C-RED 2 Lite, and C-RED 3 for surveillance. Peak frame rates are defined for full frame readout; much higher frame rates can be reached if the dynamic range is reduced or if only a subregion of the full array is read out. Short exposure noise includes contributions from both read noise and dark noise for when integrating for 50 µs intervals at 600 frames per second in high gain mode.

© Oxford Instruments 2026
