Resources
 Part of the Oxford Instruments Group
Part of the Oxford Instruments Group
Expand
Collapse
Part of the Oxford Instruments Group
Application Notes
Author: Cecile Brun
Published: 01 May 2020 · Last updated: 15 Jul 2025
Tags: nir-swir-cameras
Long exposure time in short wave infrared imaging is complex: it allows to detect and image very weak signals, but most of the existing SWIR cameras are confronted to physical limits. C-RED 2 is a SWIR 640x512 InGaAs camera which offers smart parameters tuning possibilities, optimizing the acquisitions for long (over one second) and very long exposure (over one minute).
Cameras have an intrinsic readout noise and dark current. Dark adds noise to the actual readout noise, and the longer the exposure time is, the higher the dark signal is and pixels saturate faster.
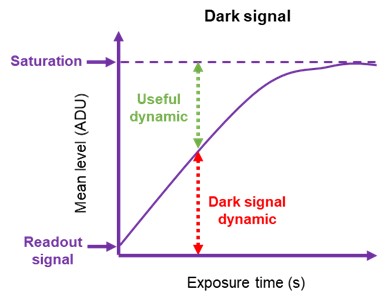
Figure 1 - Typical Behaviour. Dark signal increases linearly with exposure time, until the saturation of the sensor is reached.
All pixels do not have the same dark current, resulting in a spatial non-uniformity, referred to as Dark Signal NonUniformity (DSNU).
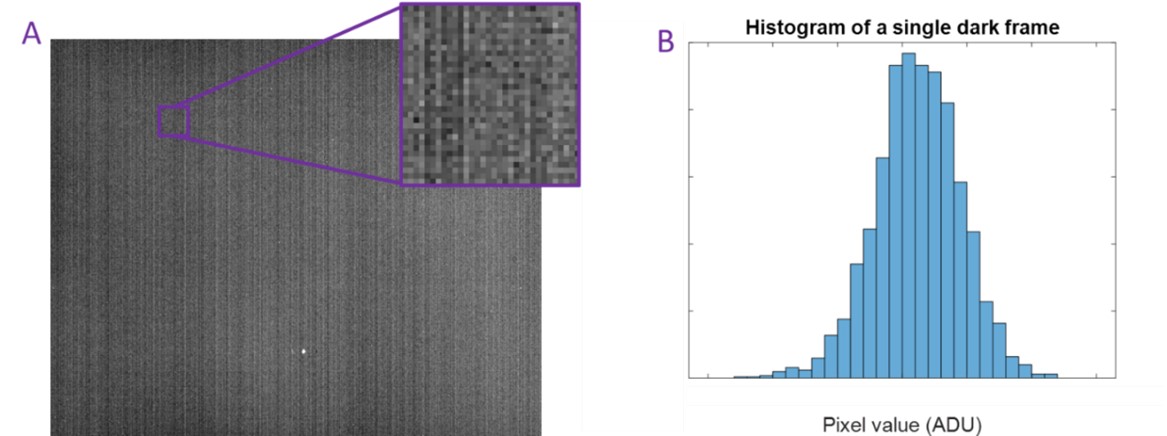
Figure 2 - Illustration of typical Dark Signal Non Uniformity. (A) Acquistion of a single image in dark conditions. The patterned column noise is caused by dark current. (B) Histogram of the single image A.
The dark current [e-/pix/s] results from thermally generated electrons in the sensor. Pixels exhibit an exponential dark current increase with temperature, generally doubling every 7 to 8°C.
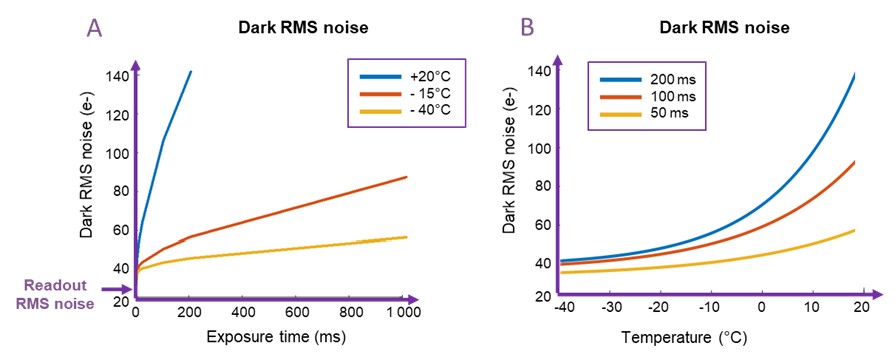
Figure 3 - Experimental measure of dark RMS (Root Mean Square) noise as a function of integration time and temperature.
Please note: For short integration times, dark current is not problematic.
Defective pixels result from electronic effects and may appear at very long exposure times. This results in either white or black pixels on the image, as illustrated in Figure 4.
Please note: These pixels are not considered as “bad pixels” because at shorter exposure times, they are operational.
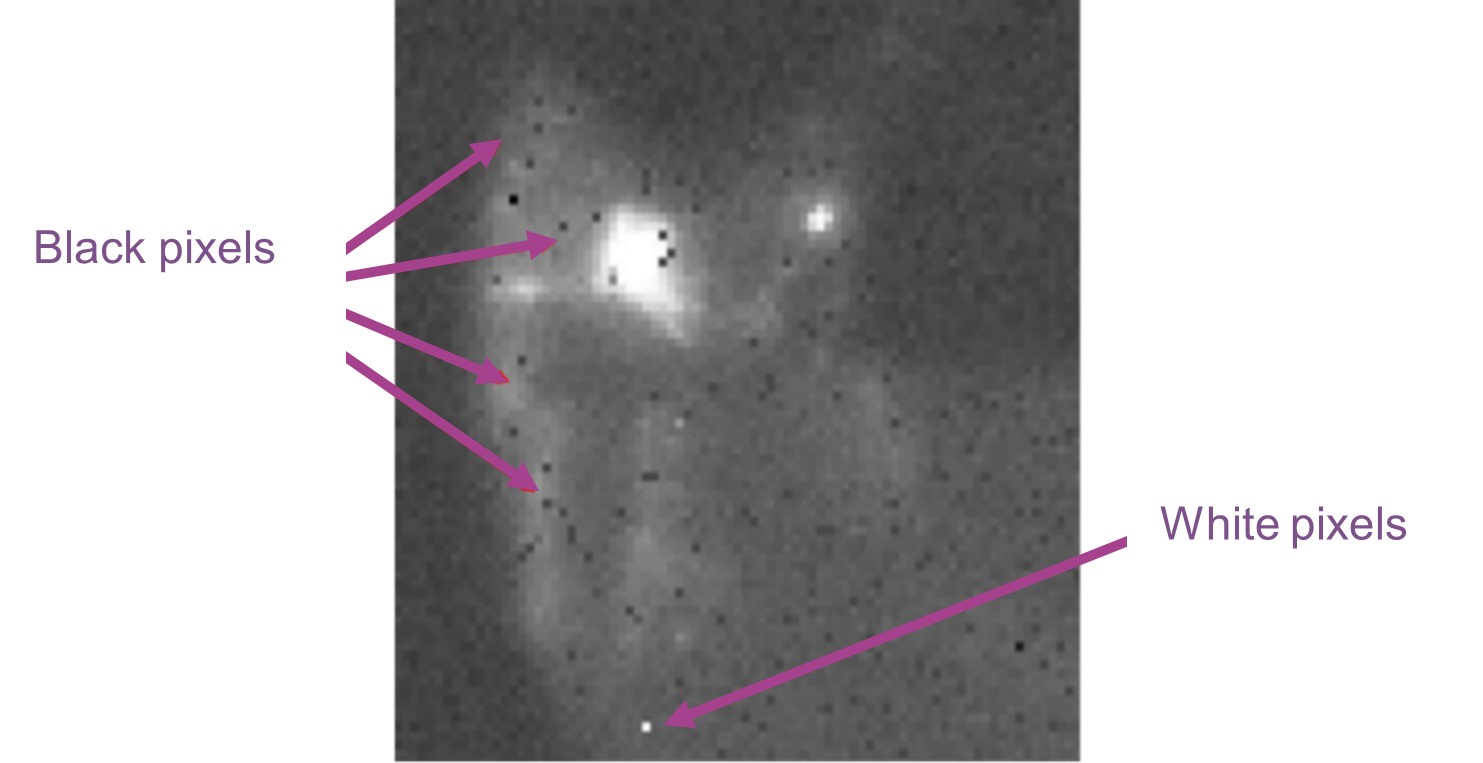
Figure 4 - Illustration of defective pixels at long exposures. Image is cropped and contrast is enhanced.
Take-home message
At long exposure times, the performances of the sensor are limited by the dark current, which increases linearly with exposure time, and exponentially with temperature.
Additionally, at very long exposure times defective pixels appear.
The performances of different cameras at long exposure times will depend both on the sensor itself and on the optimizations made by the camera to improve the acquisitions.
C-RED 2 can be cooled to -15°C with air cooling, or to the optimum temperature of - 40°C to get the best performances.
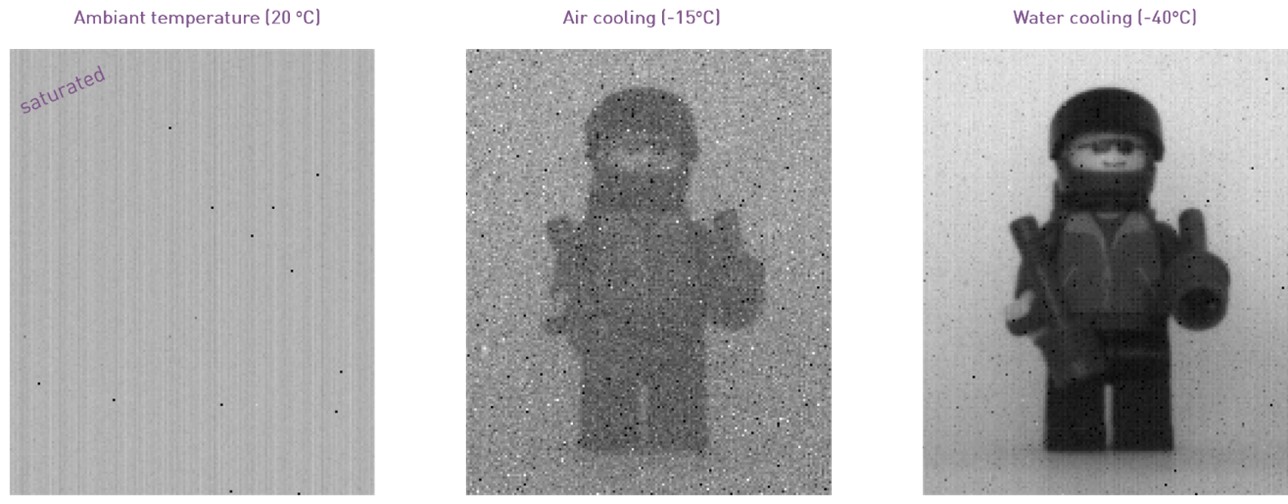
Figure 5 - Effect of cooling down the camera at long exposure time.
There are two ways to set up dark/compute bias frames: during acquisition, in order to have accurate dark values when access to the camera is easy, or previously to acquisition when access to the camera is compromised. Indeed, up to 10 “presets” bias modes can be saved in your camera, corresponding to ten different camera configurations/exposure times.
Then, dark correction files can be built directly into the C-RED 2 camera he result will be displayed directly in your FirstLightVision® GUI, and images that are saved in the buffer during acquisition will be automatically dark-corrected, avoiding post-treatment. This is on-the-fly dark correction.
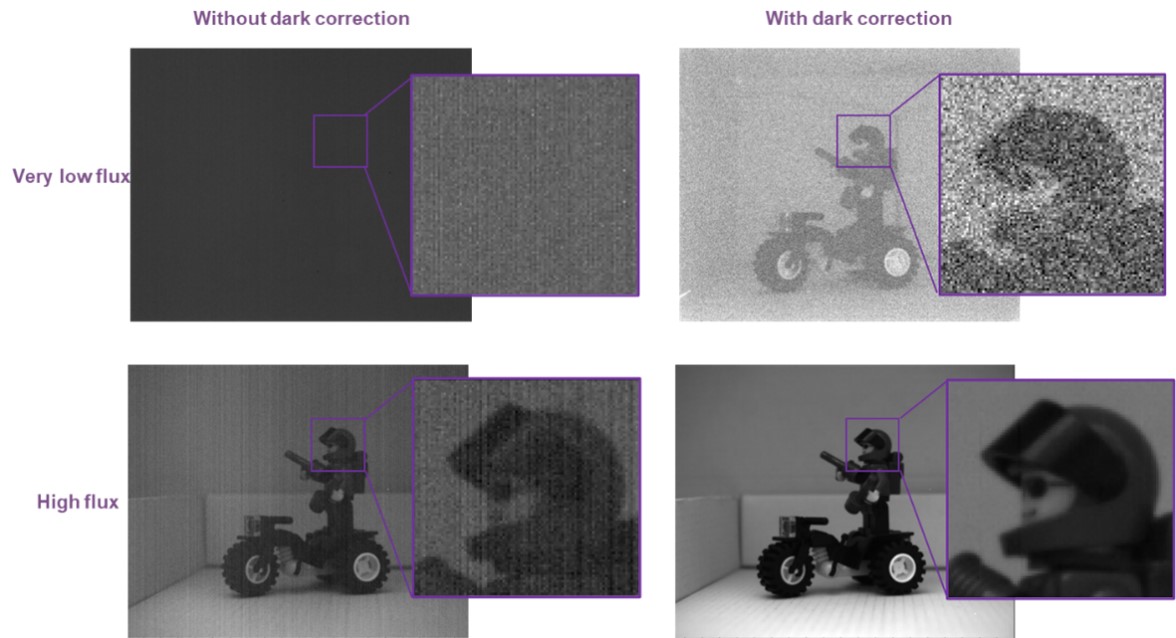
Figure 6 - Real time image, as displayed by the GUI and as saved in the buffer, when the dark correction is not applied and when it is.
The dark current can be easily adjusted using the feature “DarkOptim” level cursor in the FirstLightVision® GUI. For very long exposure times, we recommend tuning the darkoptim cursor up to 100.

Figure 7 - Screenshot of the Camera DarkOptim cursor in FirstLightVision® GUI
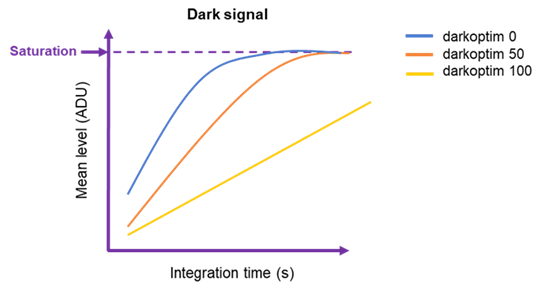
Figure 8 - Simulated data illustrating the effects of tuning the darkoptim parameter. When tuning the darkoptim parameter, the dark current can be deceased and it becomes possible to integrate longer without reaching saturation.
Please note: for short integration times, dark optim set to 0 is recommended.
C-RED 2 has been optimized to lose the fewest number of pixels in the longest exposure times possible, in 2 simple ways:
Hardware optimization of C-RED 2 allows to choose among 3 defined profiles depending on exposure times and application:
Figure 9 - Screenshot of the camera parameters menu in FirstLightVision®. The profile can be selected in the FirstLightVision® GUI
At long exposures times, the “long_exposure” profile effectively reduces the number of defective pixels. The correction is applied on-the-fly. These tunings allow to obtain the maximum camera performances for these different use cases.
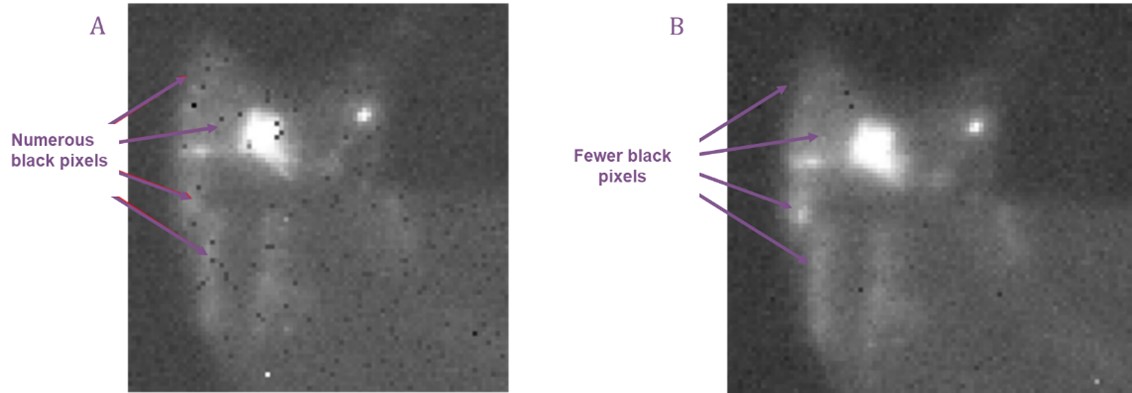
Figure 10 - Experimental illustration of the defective pixel hardware optimization using the long exposure time tuning. (A) No optimization. (B) FLI proprietary hardware optimization.
C-RED 2 automatically applies an correction to replace the bad and defective pixels. You can easily identify remaining defective pixels and add them to the bad pixel user map in the FirstLightVision® GUI.
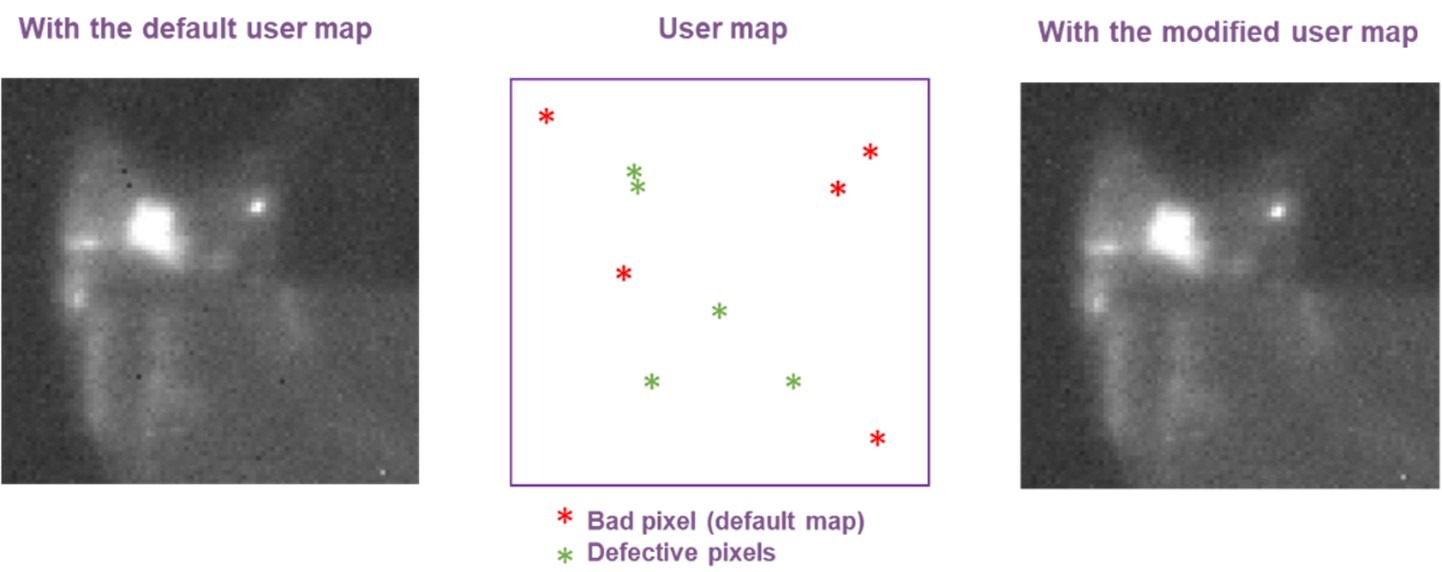
Figure 11 - Experimental illustration of the bad pixel map editing, after hardware optimization.
C-RED 2 is a high performance camera designed for demanding short wave infrared applications.
C-RED 2 enables high quality sensing at very long exposure times. The camera can also be used at extremely fast framerates (up to 600 fps) and extremely short integration times.
Thanks to this, C-RED 2 is very flexible and can be used for all your applications, ranging from night vision to neuroscience imaging.
QUICK REMINDER TO MAKE THE INVISIBLE VISIBLE
C-RED 2 offers solutions to optimize your acquisitions at long exposure times in 4 easy steps:

© Oxford Instruments 2026
